
| 研究内容紹介 |
持続可能な社会を実現するためには, 幅広い分野において科学技術によるイノベーションが不可欠です. とりわけ,分野横断的な科学技術であるシステム制御工学が 果たす役割は大きく,様々な社会課題解決に貢献することが期待されています. 当研究室では,最適化と自動化を基軸として,安心安全な社会を実現するシステム制御工学の基礎的研究と教育を行なっています.

当研究室では,エネルギーマネジメントシステム(EMS)グループ,ビークルコントロール(VC)グループおよびバッテリマネジメントシステム(BMS)グループの3班に分かれ,それぞれの分野への応用を想定したシステム制御工学の基礎的研究を行っています.
また,マルチエージェント系の制御と最適化を中心としたシステム制御の基礎理論に関する研究も行っています.
- システム制御工学とは?
- エネルギー問題に制御工学で立ち向かう(EMSグループ)
- 不確定環境下で移動ロボットを活躍させる自律制御(VCグループ)
- 制御工学による蓄電池の安全かつ有効な運用 (BMSグループ)
- マルチエージェントシステムの数理と制御
システム制御工学とは
-
ヒトが運転しなければ自転車は走らないように,システムが目的通りに機能するためには,ハードウェアだけでなくそれを動かす仕組みである制御が不可欠です.
制御のメカニズムはあらゆるシステムの中に組み込まれており,それゆえ「制御」は理工学における基本原理であると言われています.

-
システム制御工学は,
- 「制御」のメカニズムを解明し,
- 安全、高精度かつ高効率な制御アルゴリズムを開発し,
- それらを世の中の様々なシステムに適用する
-
システム制御工学の強みは,それが分野横断型科学技術であることです.つまり,システム制御工学が提供する問題解決手法は数式モデルに基づく数理的手法であるため,電気電子工学のみならず機械・ロボット,航空宇宙工学,情報通信,プロセス工学など様々な分野の問題に統一的に適用できるのです.





-
近年,私達が扱うシステムはますます大規模化・複雑化し,様々な物理領域におけるシステムが複合したものとなっています(例:ロボット,電気自動車,センサ・ネットワーク,スマートグリッドなど).このような大規模複雑システムに対しては,各分野の知識だけではなく,システム制御工学のような数理的な問題解決手法が重要な役割を果たします.
このような背景の下,当研究室では, 持続可能な社会の実現に寄与することを目指して,様々な大規模複雑システムのモデリングと制御に関する研究を行なっています.
エネルギー問題に制御工学で立ち向かう(EMSグループ)
- スマートグリッドの分散協調型電力管理
太陽光発電や風力発電などの再生可能エネルギーの大量導入や電力自由化などにより, 電力供給網の在り方は大きく変わろうとしています. これまでの電力消費者はプロシューマ(生産消費者)へと変容し,電力の売買量を自身で意思決定するようになります.また,再エネの大量導入により,電力網は天候による再エネ供給の変動に大きく影響を受けるでしょう. 当研究室ではそのような近未来を想定して,情報通信網や蓄電デバイス(バッテリ, EV)を駆使して, スマートグリッドの電力を安全かつ最適に運用する分散協調型アルゴリズムを分散最適化とシステム制御の観点から研究しています.

- マルチエネルギーシステムの最適運用
脱炭素社会の実現のために,建物または区域でエネルギーの自給自足を行うZEH (zero energy house), ZEB (zero energy building), ZED (zero energy district)が有効であると考えられています. これらの枠組みでは,電力だけでなく天然ガスや熱など複数の形態のエネルギーを統合的に運用 (調達,変換,貯蔵,消費) することが不可欠です. 当研究室では,電力,ガス,熱などを含むマルチエネルギーシステムに対して,エネルギーハブ (energy hub)の概念に基づいて,各エネルギー形態の特性を配慮したエネルギー運用の最適化手法を研究しています.
- Y. Sakamoto, T. Namba, and K. Takaba: "Energy management of a workplace with EVs via mixed-integer linear programming," Proc. of 39th Int. Technical Conf. on Circuits/Systems, Computers, and Communications (ITC-CSCC2024), 2024.
- 中島,難波,船引,鷹羽:”ブロックチェーンを用いたマイクログリッドの分散型モデル予測制御," 第64回自動制御連合講演会,online, 11月13-14日,2021.
- T. Namba, S. Funabiki, and K. Takaba: "Stochastic distributed model predictive control of microgrid with uncertain PV power prediction," SICE Journal on Control, Measurement, and System Integration, vol. 14, no.1, pp. 39-50, 2021. (Open Access)
- T. Namba, S. Yamashita, T. Hatanaka, and K. Takaba: "Distributed microgrid management using passivity-based generalized primal-dual dynamics," Proc. of 3rd IEEE Conf. on Control Technology and Applications (CCTA2019), pp. 635-642, 2019.
- T. Namba, K. Takeda, and K. Takaba: "Dual decomposition-based distributed microgrid management with PV prediction," Proc. of SICE Annual Conference 2018, pp. 964-970, 2018.
- 竹田,鷹羽:"PV発電量予測に基づくマイクログリッドの確率的モデル予測制御," 計測自動制御学会論文集, vol. 54, no. 2, pp.219-226,2018. (Free Access)
- 利根川,秋野,大橋,福原,鷹羽,島田:"順伝播型ニューラルネットワークを用いた需要家群に対する電力需要量予測," 第65回システム制御情報学会研究発表講演会(SCI21), online, 5月26-28日, 2021.
- 秋野,大橋,福原,鷹羽:"再帰型ニューラルネットワークによる短期日射量予測," 令和2年電気関係学会関西連合大会, 滋賀県草津市, 11月14,15日, 2020.
-
S.Funabiki, K. Takeda, Y.Eda, and K. Takaba: "Modified JIT-based solar irradiance prediction methods," Proc. of 50th ISCIE Int. Symposium on Stochastic Systems Theory and Its Applications (SSS2018), pp. 88-93, 2018.

- 福原,江田,竹田,鷹羽,吉川,天野:"Just-In-Time Modelingに基づく日射量予測手法のファジィクラスター分析による改良," 第61回自動制御連合講演会,名古屋市,11月17,18日, 2018.
不確定環境下で移動ロボットを活躍させる自律制御(VCグループ) 物流,災害対応,ホームサービス,農業などの様々な場面で移動ロボット(ビークル)やドローンが活躍することが期待されています.これらの場面では,屋内外を問わず不確定な環境の中で移動ロボットが自律的に作業することが要求されます. また,複数のロボットが協調して作業にあたることにより,与えられたタスクをより高精度かつ効率的に達成することが可能となります.
当研究室では,不確定環境下で複数の移動ロボットやドローンが協調作業するための制御と推定のアルゴリズムの基礎研究を行なっています.

イメージ映像
-
移動ロボットの自己位置推定と環境マッピング (SLAM)
不確定環境下で移動ロボットが与えられたタスクを達成するためには,ロボットが自身の位置と周りの環境(ランドマーク位置)を正しく認識することが必要です.このための手法をSLAM (Simultaneous Localization And Mapping)といいます.本研究では,複数のロボットを用いることによってSLAMの高精度化・高効率化を図る研究を行っています.また,複数ロボットSLAMの基礎となる分散型カルマンフィルタの理論にも取り組んでいます.
SLAM情報を用いた2台のロボットによる迷路探索シミュレーション
この動画は,以下の研究成果のデモンストレーションです.
【学会発表動画】
A Bayesian approach to distributed optimal filtering over a ring network (学会発表)
-
ドローンの自動飛行制御
近年ドローン技術は急速に進展しています. 当研究室では,不確定環境下でドローンに与えられたタスクを自律的に実行させるための研究として,内蔵カメラからの画像フィードバックによる遠隔自動飛行制御,地上移動体とドローンの連携作業,複数ドローンによる協調搬送,複数ドローンによる協調探索のための制御アルゴリズムに関する研究を行っています.
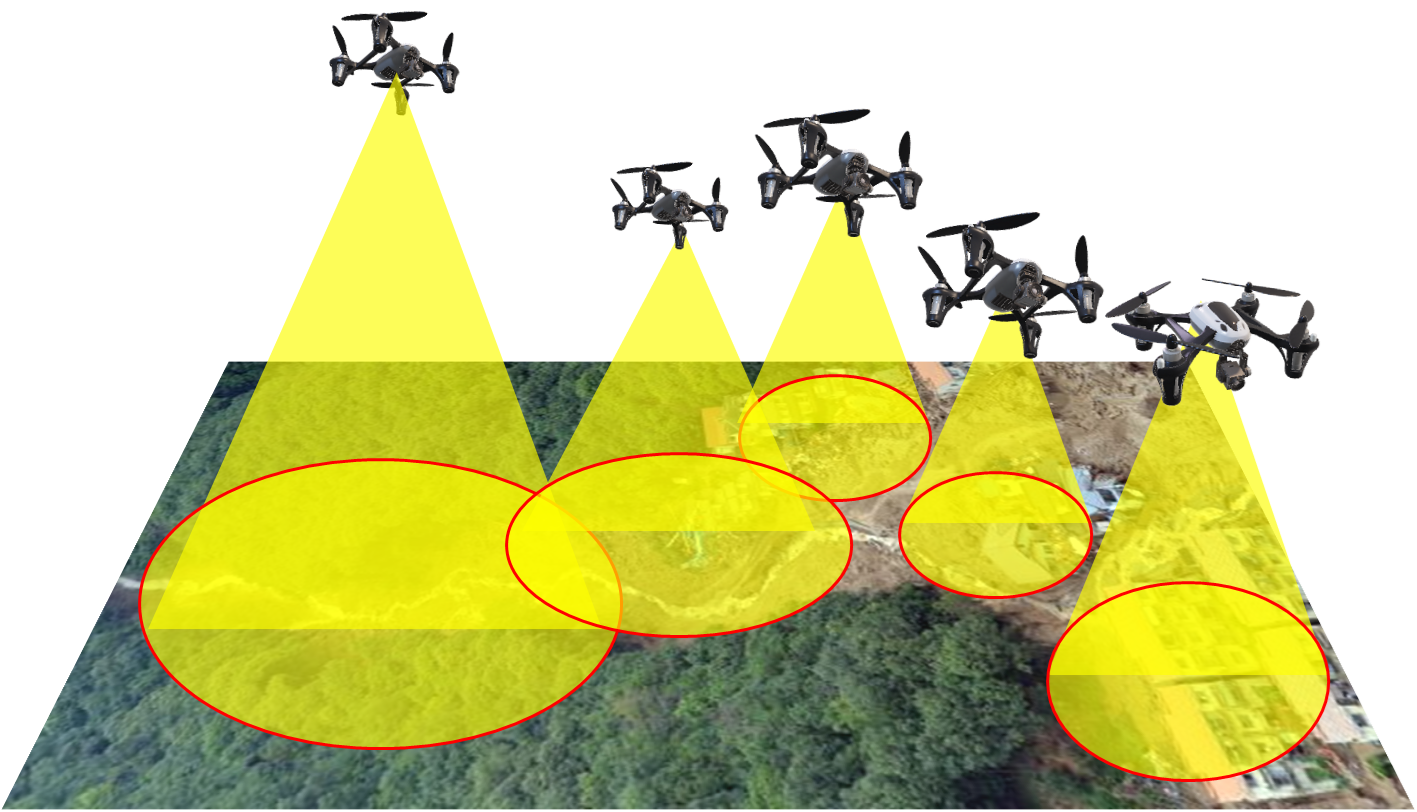
複数ドローンによる協調探索(被覆制御)の概念図
この動画は,以下の研究成果のデモンストレーションです.
ドローンと地上移動体との連携制御(地上移動体への着陸)シミュレーション
Y. Zhou and K. Takaba: "Optimal landing control of an unmanned aerial vehicle via partial feedback linearization," Proc. of ICAMechS2019, 2019.
【学会発表動画】
- Model predictive landing control of an unmanned aerial vehicle via partial feedback linearization (学会発表)
- 3D model predictive landing control of an unmanned aerial vehicle via partial feedback linearization (学会発表)
-
フォーメーション制御は,複数の移動ロボットやドローンを自律分散的に制御することにより,全体としてフォーメーション(編隊)を形成して航行させる制御の枠組みです.
本研究では,車両型移動ロボット群に対して,障害物が存在したり地面が傾斜しているような悪環境の下でもフォーメーションを形成し協調作業をさせるための新しい制御手法に関する研究を行っています.
重力の影響を考慮した斜面上のフォーメーション制御実験
この動画は,以下の研究成果のデモンストレーションです.
障害物回避を考慮したフォーメーション制御実験
北:"障害物回避を考慮した移動ロボット群のフォーメーション制御の実機実験," 卒業研究報告書,立命館大学 理工学部 電気電子工学科 システム制御工学研究室,2015.
- 佐藤,鷹羽:分散型カルマンフィルタの推定誤差解析,第5回測位技術振興会研究発表講演会,大阪,9月1日, 2023.
- 鷹羽,辻,大橋:"環状ネットワーク上の分散型Unscentedカルマンフィルタ," 第3回測位技術振興会研究発表会,online, 9月 2021.
- A. Tsuji, A. Ohashi, and K. Takaba: "A Bayesian approach to disitributed optimal filtering over a ring network," Measurement: Sensors, vol. 18, article:100223, 2021.
- K. Kishimoto, K. Takaba, and A. Ohashi: "Moving horizon multi-robot SLAM based on C/GMRES method," Proc. of 2019 Int. Conf. on Advanced Mechatronic Systems (ICAMechS2019), pp. 22-27, 2019.
- 橋本,鷹羽: "SLAM情報を用いた複数ロボットによる効率的迷路探索法," 第63回システム制御情報学会研究発表講演会(SCI19), 2019.
- I. Kimoto, K. Takaba: "Effective line-based SLAM with adaptive tuning of particles," Proc. of 2nd IEEE Conf. on Control Technology and Applications (CCTA2018), pp. 1159-1165, 2018.
- T. Sasaoka, Y. Kishimoto, and K. Takaba: "Multi-robot SLAM via distributed extended Kalman filters," Proc. of 17th Int. Conf. Control, Automation and Systems (ICCAS2017), pp.1661-1662, 2017.
- T. Sasaoka, I. Kimoto, Y. Kishimoto, K. Takaba, and H. Nakashima: "Multi-robot SLAM via Information Fusion Extended Kalman Filters," Proc. of 6th IFAC Workshop on Distributed Estimation and Control in Networked Systems, pp.303-308, 2016.
- 村松,鷹羽:UAVに吊り下げられた荷物の着陸のための最適な軌道計画,第67回システム制御情報学会研究発表講演会(SCI'23),京都,5月17-19日, 2023.
SCI学生発表賞受賞 - Y. Zhou, A. Ohashi, and K. Takaba: "3D Model predictive landing control of an unmanned aerial vehicle by using partial feedback linearization," SICE Annual Conference 2021, on-line, Sept 8-10, 2021.
-
Y. Zhou, A. Ohashi, and K. Takaba: "Model predictive landing control of an unmanned aerial vehicle by using partial feedback linearization,"
Proc. of the 2020 IEEE Region 10 Conference (TENCON2020) , pp. 1159-1164, 2020. - Y. Zhou and K. Takaba: "Optimal landing control of an unmanned aerial vehicle via partial feedback linearization," Proc. of 2019 Int. Conf. on Advanced Mechatronic Systems, pp.218-223, 2019.
- 嶋田,新,鷹羽:"ゲインスケジューリングH∞制御による無人航空機の目標値追従制御," 第64回システム制御情報学会研究発表講演会(SCI20), zoom,5月20-22日, 2020.
学生発表賞受賞 - T. Yamaguchi and K. Takaba: "Remote tracking control of a quadrotor-type drone subject to uncerrtain time delays," Proc. of SICE Annual Conference 2018, pp. 1137-1143, 2018.
- J. Shirai, T. Yamaguchi and K. Takaba: "Remote visual servo control of drone taking account of time delays," Proc. of SICE Annual Conference 2017, pp. 1589-1594, 2017.
- K. Takubo, S. Miyagawa, and K. Takaba: "Formation control of wheeled vehicles on a slope," Proc. of 18th Int. Conf. Control, Automation and Systems (ICCAS2018), pp. 114-119, 2018.
- D.Tsuzuki and K.Takaba: "Vehicle following and formation control of nonholonomic vehicles using time-state control form," Proc. of SICE Annual Conference 2016, pp.1666-1672, 2016.
- 鷹羽,宮川: 斜面上の移動体のフォーメーション制御, 第58回自動制御連合講演会,神戸,11月14,15日,2015.
- 宮崎,鷹羽:“障害物回避を考慮した移動ロボット群のフォーメーション制御,” システム制御情報学会論文誌, vol.28, no.2, pp.50-57, 2015. (Free Access)
- T. Miyazaki, K. Takaba: "Formation control of mobile robots with obstacle avoidance," Proc. of 14th Int. Conf. Control, Automation and Systems (ICCAS2014), pp. 121-126, 2014.
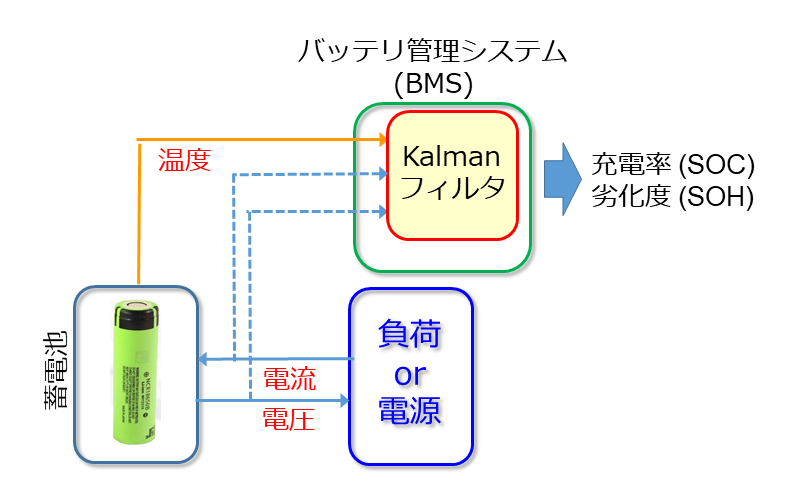
制御工学によるリチウムイオン蓄電池の有効運用 エネルギー密度向上・大容量化によりリチウムイオン蓄電池の普及が進んでいます (特に電気自動車への搭載).リチウムイオン蓄電池の安全かつ効率的な運用のためにはバッテリマネジメントシステム (BMS) が不可欠であり,それが備えるべき重要な機能の中に充電率(SOC)および劣化度 (SOH) の推定,劣化診断などがあります. 特にSOC推定は,過充電による発火の防止、異常検知の観点からオンラインで高精度に推定できることが望まれています.
そこで当研究室では,カルマンフィルタやシステム同定といった制御工学の手法を用いて蓄電池の数理モデルに基づくSOC推定とSOH推定の高精度化に取り組んでいます.
- 溝口,鷹羽:ニューラルネットワークとEKFによるリチウムイオン蓄電池のエネルギー状態推定,2023年度SICE関西支部-ISCIEシンポジウム,大阪,1月12日, 2024.
- T. Kikuchi and K. Takaba: "Multirate SOC estimation of lithium-ion batteries using constant phase element model," 53rd ISCIE Int. Symposium on Stochastic Systems Theory and Its Applications (SSS2021), 2021.
- 菊地,鷹羽:"定位相要素を用いたリチウムイオン蓄電池のマルチレートSOC推定," 第65回システム制御情報学会研究発表講演会(SCI21), online, 5月26-28日, 2021.
- 林,福井,有馬,鷹羽: "電流観測ノイズを考慮した高精度蓄電池残量推定システム," 電子情報通信学会和文論文誌B, vol. J104-B, no.1, pp. 1-9, 2021.
- 小森,鷹羽:"リチウムイオン蓄電池の単粒子モデルの内部パラメータ同定," 令和2年電気関係学会関西連合大会, 滋賀県草津市, 11月14,15日, 2020.
- 林,井本,鷹羽,福井:"リチウムイオン蓄電池の制約条件付き逐次パラメータ推定," 令和元年電気関係学会関西連合大会,大阪市,11月30日-12月1日,2019.
- Y. Imoto, K. Takaba, L. Lin, and M. Fukui: "SOC estimation of lithium-ion batteries by extended Kalman fixed lag smoother," Proc. of 50th ISCIE Int. Symposium on Stochastic Systems Theory and Its Applications (SSS2018), pp. 83-87, 2018.
- M. Oya, W. Sueki, Y. Hayakawa, K. Takaba, and M. Fukui: "Combined RLS-EKF method for simultaneous SOC and parameter estimations for lithium-ion batteries," ECS Transactions, vol. 80. no. 10, pp. 207-217, 2017.
- L. Lin, H. Ono, M. Fukui, and K. Takaba: "An in situ full charge capacity estimation algorithm for li-ion batteries using recursitve least-squares identification with adaptive forgetting factor tuning," ECS Transactions, vol. 75, no. 20, pp. 111-119, 2017.
- 大矢,末岐,鷹羽,福井: “拡張カルマンフィルタによるリチウムイオン電池のSOC推定法の比較検討,” 電池討論会,幕張,11月30日〜12月2日, 2016.
- 大矢,鷹羽,林,石崎,河原林,福井: "パラメータ依存状態空間モデルに基づく蓄電池のSOC推定," システム制御情報学会論文誌, vol.29, no.10, pp.433-440, 2016.
- 林,石崎,鷹羽,福井: "適応的忘却係数調整によるリチウムイオン蓄電池の逐次最小2乗同定," 電子情報通信学会論文誌B, vol.J99-B, no.7, pp. 481-489, 2016.
- L.Lin, K.Takaba and M.Fukui: "An accurate SOC estimation system for lithium-ion batteries by EKF with dynamic noise adjustment," Proc. 15th Int. Symp. on Communications and Information Technologies (ISCIT2015), pp.33-36, 2015.
マルチエージェントシステムの数理と制御 複数のエージェントがネットワーク上に散在し,各エージェントが隣のエージェントとの局所的な相互作用・情報交換を通じて自律分散的に制御することにより,同期・合意形成・編隊航行などの協調的なタスクを遂行するシステムをマルチエージェントシステムといいます. マルチエージェントシステムは,スマートグリッド,センサネットワーク,ビークル制御,分散コンピューティング,物理学,システムバイオロジーなど多分野に応用があり,そのための制御理論の構築が期待されています.
・モデル変動をもつエージェント群のロバスト同期制御
・クラウドなどの高度情報技術を利用した分散協調制御
・データ駆動型分散協調制御
・分散型カルマンフィルタ
などに重点を置いて基礎的な研究を進めています.
同期現象の例:メトロノームの同期実験
振動が台を介して伝わる*ことにより,最初バラバラだった各メトロノームが相互作用し同期します.
* 台もわずかに振動しています.
デモ:確率的に切り替わるネットワーク上の非線形エージェントの同期シミュレーション
画面上の4色の◎印は各非線形エージェントの状態を表し,これらが重なれば同期が達成されたことを意味します.エージェント間の通信リンク(黒線)が確率的に切り替わる状況の下で,これら4つのエージェントが同期していく様子をMATLABでシミュレーションしました.
通信リンクがつながった時,エージェントは相手のエージェントからの情報に基づいて自分自身を制御しています.
K. Takaba: "Synchronization of passive agents over stochastically switching networks with imperfect prior information," 45th ISCIE Symposium on Stochastic Systems, Okinawa, November 1,2, 2013.
- T. Namba and K. Takaba:"Cloud-mediated self-triggered synchronization of physically coupled linear agents," IEEE Control Systems Letters, vol. 7, pp. 3836-3841, 2023.
- T. Namba and K. Takaba: "Self-triggered output synchronization of heterogeneous linear agents through a cloud repository," SICE Journal on Control, Measurement, and System Integration, vol. 16, no. 1, pp. 215-226, 2023.
- T. Namba and K. Takaba:"Cloud-mediated self-triggered synchronization of a general linear multi-agent system over a directed graph," IET Cyber-Physical Systems: Theory & Applications, 2024.
- K. Takaba: "Robust synchronization of linear multi-agent system with input/output constraints," Artificial Life and Robotics, vol. 23, no. 4, pp. 577-584, 2018.
- K.Takaba: "Synchronization of linear agents with input/output constraints," IFAC PapersOnline, vol.50, no.1, pp.1817-1821, 2017.
- K. Takaba: "Local synchronization of linear multi-agent systems subject to input saturation," SICE Journal on Control, Measurement, and System Integration, vol.8, no.5, pp.334-340, 2015.
- K. Takaba: "A dynamic protocol for local synchronization of linear multi-agent systems subject to input saturation," Proc. of IEEE 54th Conf. on Decision and Control, pp. 4923-4928, 2015.
- K. Takaba: "Synchronization of linear agents with sector-bounded input nonlinearities," Proc. of 15th Int. Conf. Control, Automation and Systems, pp. 1-6, 2015.
- K. Takaba: "Synchronization of linear multi-agent systems with input nonlinearities via dynamic protocols," Mathematical Control Theory II: Behavioral Systems and Robust Control (M.N.Belur, M.K.Camlibel, P.Rapisarda, J.M.A.Scherpen (eds.)), Springer-Verlag, pp.169-181, 2015.
- H.L. Trentelman, K. Takaba and N. Monshizadeh: "Robust synchronization of uncertain linear multi-agent systems," IEEE Transactions on Automatic Control, vol. 58, no. 6, pp. 1511-1523, 2013.
- K. Takaba: "Robust synchronization of nonlinar agents over directed communication graph," Proc. of 7th IFAC Symposium on Robust Control Design, pp. 33-38, 2012.
- 佐藤,鷹羽:分散型カルマンフィルタの推定誤差解析,第5回測位技術振興会研究発表講演会,大阪,9月1日, 2023.
- 鷹羽,辻,大橋:"環状ネットワーク上の分散型Unscentedカルマンフィルタ," 第3回測位技術振興会研究発表会,online, 9月 2021.
- A. Tsuji, A. Ohashi, and K. Takaba: "A Bayesian approach to disitributed optimal filtering over a ring network," Measurement: Sensors, vol. 18, article:100223, 2021.
- A. Ohashi, K. Takaba: "A modified GMRES method for a symmetric solution to Lyapunov equation for multi-agent systems, SICE Journal on Control, Measurement, and System Integration, vol. 12, no. 6, pp. 223-227, 2019.
- A. Ohashi and K. Takaba: "A modified GMRES method for solving large-scale Lyapunov equations for multi-agent systems," Proc. of SICE Annual Conference 2017, pp. 1583-1588, 2017.