
| マルチエージェントシステムのロバスト分散協調制御とその応用 |
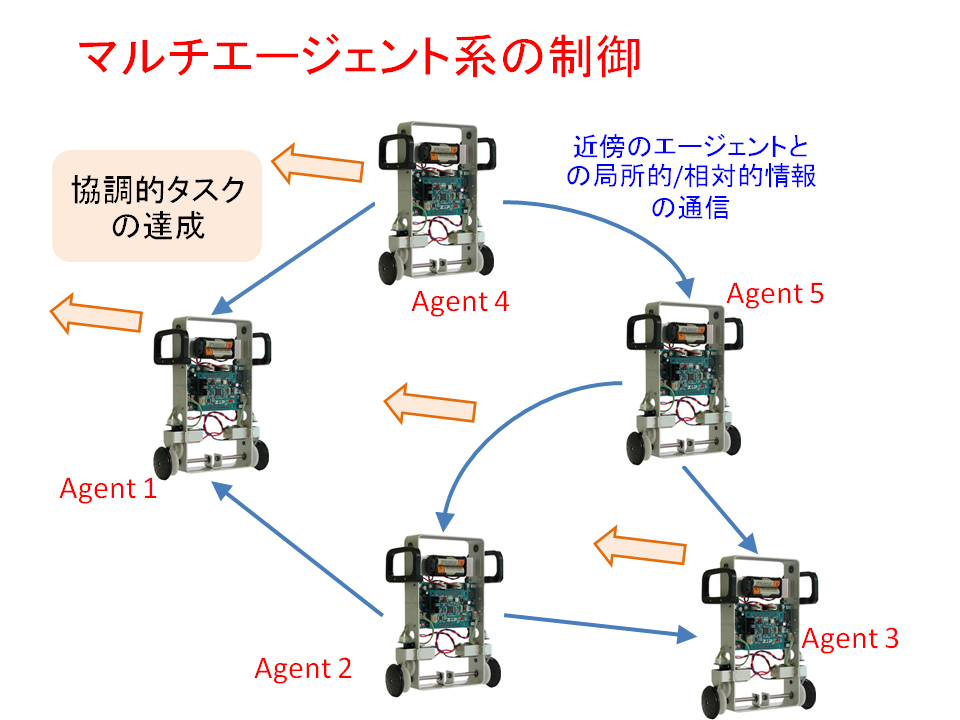
複数のエージェントがネットワーク上に散在し,近接するエージェントとの局所的な情報交換に基づいて各エージェントが分散的に制御することにより,同期・合意形成・フォーメーション等の協調的なタスクを実行するシステムをマルチエージェントシステムといいます.
マルチエージェントシステムは,物理学,生物学,センサネットワーク,移動体の編隊制御,分散コンピューティングなど多分野に応用があり,そのための制御理論の構築が期待されています.
また,本研究の一環として,小型移動ロボット群のフォーメーション制御,分散型蓄電池の協調制御に関する実験を行う予定です.
- 確率的に切り替わるネットワーク上での非線形エージェントの同期
4つのエージェント(◎印)の間の通信リンク(黒線)が確率的に切り替わる状況の下で, これらのエージェントが同期していきます. 通信リンクがつながった時,エージェントは隣接するエージェントとの出力の相対誤差に基づいて自分自身を制御しています.K. Takaba: "Output synchronization of passive agents over stochastically switching networks," presented in 44th ISCIE Symposium on Stochastic Systems, Tokyo, November 1,2, 2012.
- フォーメーション制御のシミュレーション (MATLAB使用)
最初バラバラの方向に進んでいた3つの黒いfollower機が,分散協調制御により,
赤いleader機に追従しながら,ある一定のフォーメーションを形成します. -
コンセンサス(合意形成)制御のシミュレーション
各エージェント(青点)は,黒線で隣り合うエージェントからの情報に基づいて自身の状態を更新する.
ネットワークが連結グラフである(左の動画)ならば,エージェントは合意に達し,平均値(赤点)へ収束する.
一方,右の動画のようにネットワークが連結でなければ,各エージェントの状態は複数の値に収束し,合意には至らない(赤点へ収束しない).
【関連する研究業績】
- K. Takaba, A. Hibi: "Synchronization of coupled nonlinear oscillators via regional pole placement technique," Proc. of 51st IEEE Conf. Decision and Control, Maui, USA, December 10-13, to appear, 2012.
- K. Takaba: "Output synchronization of passive agents over stochastically switching networks," 44th ISCIE Symposium on Stochastic Systems, Tokyo, November 1,2, 2012.
-
K. Takaba: "Robust synchronization of nonlinar agents over directed communication graph," Proc. of 7th IFAC Symposium on Robust Control Design, Aalborg, Denmark, June 20-22, pp. 33-38, 2012.
論文ダウンロード -
H.L. Trentelman, K. Takaba:
"Robust synchronization of linear multi-agent systems with additive uncertainty," Proc. 20th Int. Symp. on Mathematical Theory of Networks and Systems (MTNS2012), Paper No. 0171, Melbourne, Australia, July 9-13, 2012.
論文ダウンロード スライド・ダウンロード - 加門,鷹羽:時変なネットワーク上の平均合意問題,第56回システム制御情報学会研究発表講演会,京都,5月21〜23日,2012.
- H. Trentelman, K. Takaba: Robust synchronization of uncertain linear multi-agent systems, 56回システム制御情報学会研究発表講演会,京都,5月21〜23日,2012.