
To achieve a sustainable society, innovation driven by science and technology across a wide range of fields is indispensable. In particular, system and control engineering, a multidisciplinary technology, plays a particularly significant role and is expected to contribute to solving various social challenges. Our laboratory has been conducting fundamental research and education in system and control engineering, emphasizing optimization and automation to realize a safe and secure society.
Specifically, we have been working on system and control engineering with the following three groups.
Energy Management System (EMS) Group
Vehicle Control (VC) Group
Battery Management System (BMS) Group
We are also conducting research on fundamental system and control theory focusing on multi-agent control and optimization.
- What is System and Control Engineering ?
-
Solve Energy Issues with the Power of Control!
(EMS Group) -
Control Techniques Enabling Autonomous Vehicles to Operate in Uncertain Environments
(VC Group) -
Safe and Efficient Operation of Batteries via Control Techiques
(BMS Group) - Control Theory of Multi-Agent Systems
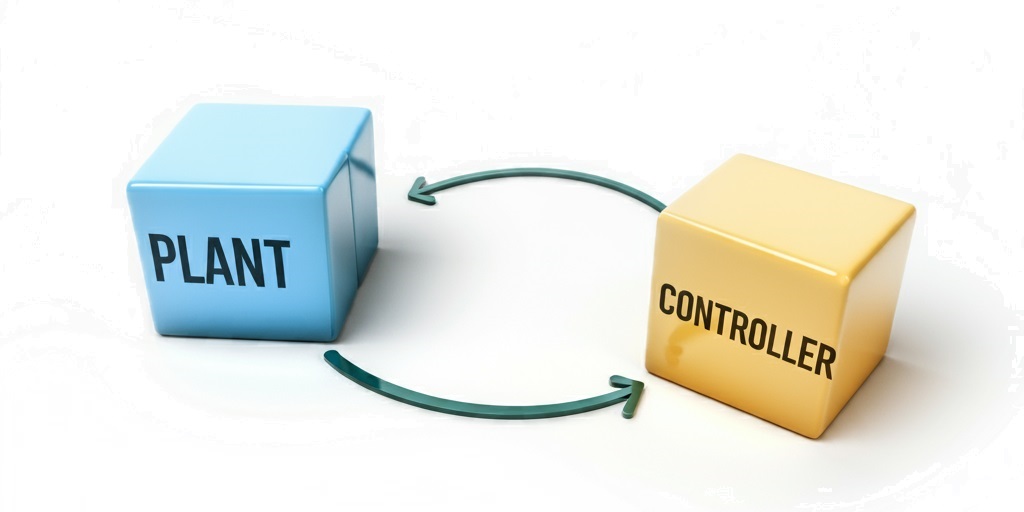
What is System and Control Engineering?
-
Just as a bicycle cannot run without a person riding it, any system requires not only hardware but also the control mechanism that drives it to function as intended.
Control mechanisms are embedded in all systems, which is why it is often said that "control is a fundamental principle in science and engineering.

-
Systems and Control Engineering
is a field of technology that contributes to the development of a better society by
- elucidating the mechanism of "control",
- devising safe, accurate, and efficient control alogrithms, and
- applying them to various systems around the world.
-
The strong point of systems control engineering is that it is an interdisciplinary technology.
In other words, the approach for problem solutions provided by system and control engineering is based on mathematical models and hence can be uniformly applied to problems in a wide variety of fields, including electrical and electronic engineering, mechanical engineering, robotics, aerospace engineering, information and communications, and process engineering, etc.
-
Systems in our modern society have become increasingly large-scale and complex, and are now a combination of systems in various physical domains (e.g., robots, electric vehicles, sensor networks, smart grids, etc.).
To deal with such large-scale complex systems, mathematical problem solution approaches such as systems control engineering play an important role as well as knowledge from individual fields.
Against the above background, we are conducting research on the modeling and control of various large-scale complex systems aiming to contribute to the realization of a sustainable society.
Solve Energy Issues with the Power of Control!
- EMS group -
-
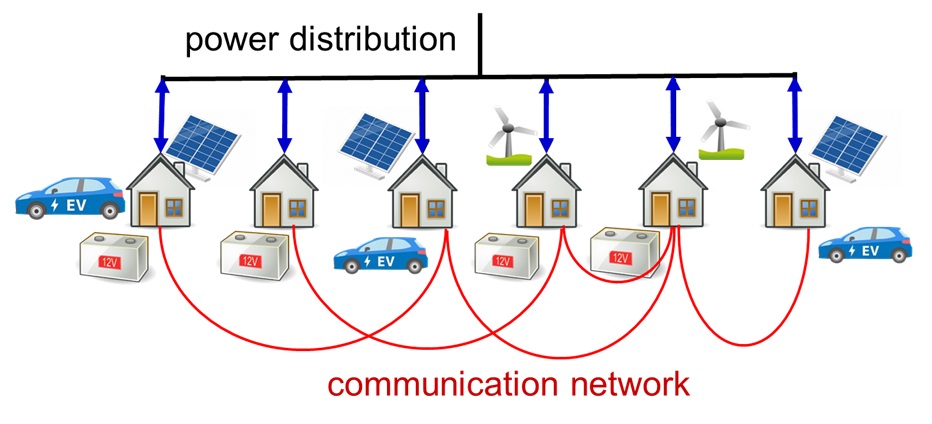
Distributed cooperative energy management of smart grids
The large-scale introduction of renewable energy such as solar and wind power generation, as well as the liberalization of the power industry, are about to significantly change the nature of the power supply network. Current electricity consumers will be transformed into prosumers (producers and consumers) and will be able to make their own decisions about the amount of electricity they buy and sell. In addition, with the large-scale introduction of renewable energy, the power network will be greatly affected by fluctuations in renewable energy supply due to weather. In anticipation of such a near future, our laboratory is researching distributed cooperative algorithms that safely and optimally operate smart grid electricity from the perspective of distributed optimization and system control, making full use of information and communication networks and energy storage devices (batteries, EVs).
- Optimal operation of multi-energy systems
In order to realize a decarbonized society, it is believed that ZEH (zero energy house), ZEB (zero energy building), and ZED (zero energy district), which are buildings or areas that are energy self-sufficient, are effective. In these frameworks, it is essential to integrate the management (procurement, conversion, storage, and consumption) of multiple forms of energy, including not only electricity but also natural gas and heat. In our laboratory, we are researching optimization methods for energy management that take into account the characteristics of each energy form for multi-energy systems that include electricity, gas, heat, etc., based on the concept of an energy hub.
- Y. Sakamoto, T. Namba, and K. Takaba: "Energy management of a workplace with EVs via mixed-integer linear programming," Proc. of 39th Int. Technical Conf. on Circuits/Systems, Computers, and Communications (ITC-CSCC2024), 2024.
- S.Nakashima, T.Nambda, S.Funabiki, and K.Takaka: "Distributed Model Predictive Management of Microgrid via Blockchain," 64th Japan Joint Automatic Control Conference, online, November 13-14, 2021 (in Japanese).
- T. Namba, S. Funabiki, and K. Takaba: "Stochastic distributed model predictive control of microgrid with uncertain PV power prediction," SICE Journal on Control, Measurement, and System Integration, vol. 14, no.1, pp. 39-50, 2021.
- T. Namba, S. Yamashita, T. Hatanaka, and K. Takaba: "Distributed microgrid management using passivity-based generalized primal-dual dynamics," Proc. of 3rd IEEE Conf. on Control Technology and Applications (CCTA2019), pp. 635-642, 2019.
- T. Namba, K. Takeda, and K. Takaba: "Dual decomposition-based distributed microgrid management with PV prediction," Proc. of SICE Annual Conference 2018, pp. 964-970, 2018.
- K. Takeda andn K. Takaba: "Stochastic Model Predictive Control for Microgrid Management Based on PV Power Prediction," Trans. of the Society of Instrument and Control Engineers, vol. 54, no. 2, pp.219-226,2018 (in Japanese).
-
S.Funabiki, K. Takeda, Y.Eda, and K. Takaba: "Modified JIT-based solar irradiance prediction methods," Proc. of 50th ISCIE Int. Symposium on Stochastic Systems Theory and Its Applications (SSS2018), pp. 88-93, 2018.

- D. Fukuhara, Y. Eda, K. Takeda, K. Takaba, N. Yoshikawa, and K. Amano: "Improvement of Just-In-Time-Based Solar Radiation Prediction Method by Using Fuzzy Clustering," 61st Japan Joint Automatic Control Conference, Nagoya, November 17-18, 2018 (in Japanese).
Control Techniques Enabling Autonomous Vehicles to Operate in Uncertain Environments
- VC Group - Autonomous vehicles such as mobile robots and drones are expected to play an important role in various fields including logistics, disaster rescue, home services, agriculture, etc. In these fields, autonomous vehicles are required to operate autonomously in uncertain environments, both indoors and outdoors. It will also be possible to accomplish a given task more precisely and more efficiently by having multiple vehicles work in cooperation,
We are conducting basic research on control and estimation algorithms that realize more efficient and reliable cooperative operation of multiple mobile robots or drones in uncertain environments.

-
Simultaneous Localization and Mapping with Mobile Robots
For a mobile robot to accomplish a given task in an uncertain environment, it is necessary for the robot to correctly recognize its own position and the surrounding environment (landmark positions). The technique for this is called SLAM (Simultaneous Localization And Mapping). In this research, we are working to improve the accuracy and efficiency of SLAM by using multiple robots. We are also working on the theory of distributed Kalman filters, which are the basis of multi-robot SLAM.
An efficient maze exploration by two robots based on SLAM information
W. Hashimoto and K. Takaba: "An efficient maze exploration method by multiple robots using SLAM information," 63rd Annual Conference of the Institute of Systems, Control and Information Engineers (SCI'19), 2019.
A Bayesian approach to distributed optimal filtering over a ring network
(presented at IMEKO 2021)
-
Automatic Flight Control of UAVs
UAV technologies have been rapidly developing in recent years. We are working on the development of control algorithms for enabling UAVs to autonomously execute given tasks in uncertain environments, including remote flight control with image feedback from built-in cameras, coordinated operations between ground vehicles and UAVs, cooperative transportation by multiple UAVs, and cooperative exloration with multiple UAVs.
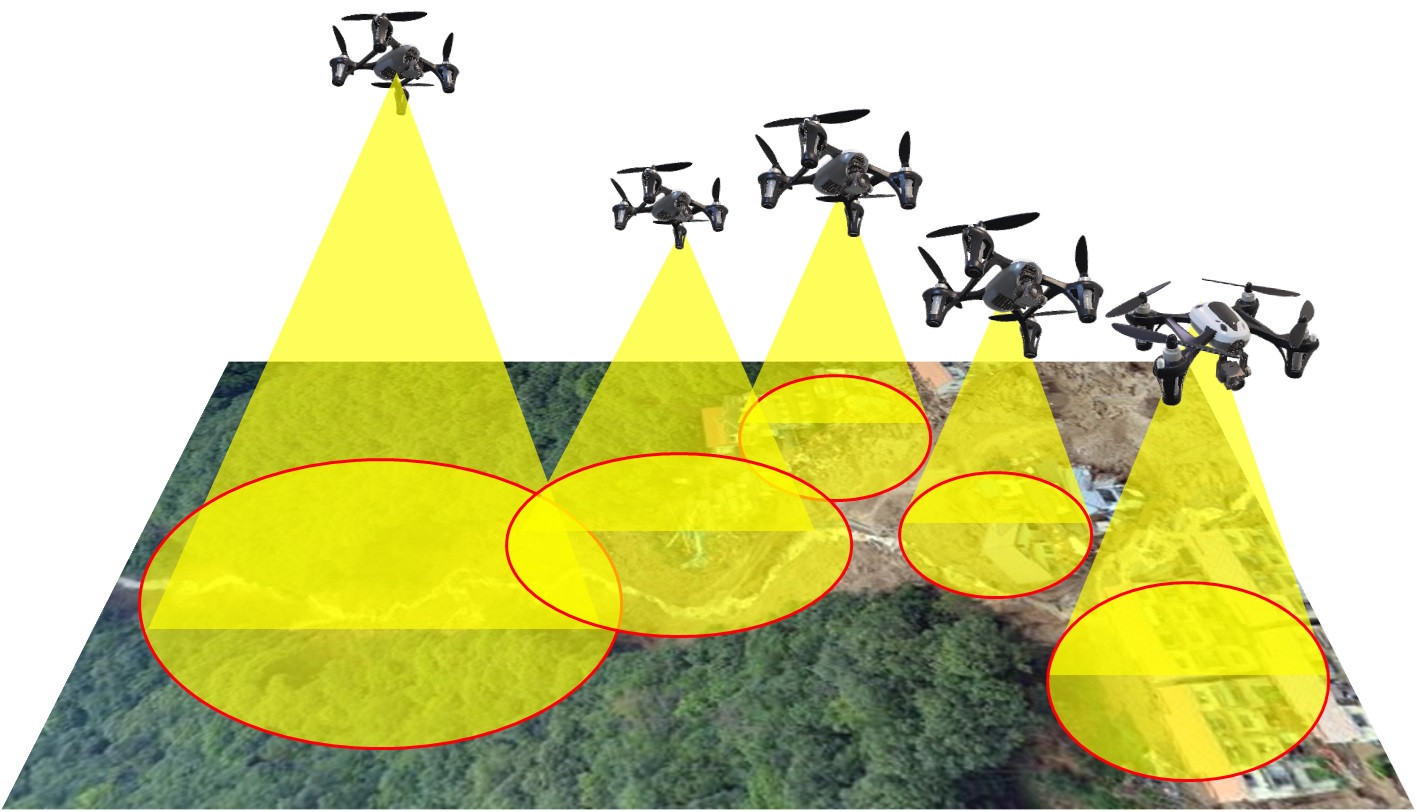
Conceptual picture of coverage control with UAVs
J. Shirai, T. Yamaguchi and K. Takaba: "Remote visual servo control of drone taking account of time delays," Proc. of SICE Annual Conference 2017, pp. 1589-1594, 2017.
Cooperative control between an UAV and a ground vehicle (UAV's landing onto a moving ground vehicle)
Y. Zhou and K. Takaba: "Optimal landing control of an unmanned aerial vehicle via partial feedback linearization," Proc. of ICAMechS2019, 2019.
- Model predictive landing control of an unmanned aerial vehicle via partial feedback linearization (presented at IEEE Region 10 Conference)
- 3D model predictive landing control of an unmanned aerial vehicle via partial feedback linearization (presented at SICE 2021)
Formation control of mobile robots on a slope compensating the gravitational effect
K. Takubo, S. Miyagawa, and K. Takaba: "Formation control of wheeled vehicles on a slope," Proc. of 18th Int. Conf. Control, Automation and Systems (ICCAS2018), 2018.
Experiment of formation control with obstacle avoidance
H. Kita: "Experimental study on formation control of mobile robots with obstacle avoidance," Graduation Report, System and Control Engineering Lab, Ritsumeikan University, 2015.
- D. Tetsuno and K. Takaba: "Multi-robot FastSLAM based on consensus of observed data," Proc. of the 2024 International Conference on Advanced Mechatronic Systems (ICAMechS2024), pp. 55-60, 2024.
- A. Tsuji, A. Ohashi, and K. Takaba: "A Bayesian approach to disitributed optimal filtering over a ring network," Measurement: Sensors, vol. 18, article:100223, 2021.
- K. Kishimoto, K. Takaba, and A. Ohashi: "Moving horizon multi-robot SLAM based on C/GMRES method," Proc. of 2019 Int. Conf. on Advanced Mechatronic Systems (ICAMechS2019), pp. 22-27, 2019.
- I. Kimoto, K. Takaba: "Effective line-based SLAM with adaptive tuning of particles," Proc. of 2nd IEEE Conf. on Control Technology and Applications (CCTA2018), pp. 1159-1165, 2018.
- T. Sasaoka, Y. Kishimoto, and K. Takaba: "Multi-robot SLAM via distributed extended Kalman filters," Proc. of 17th Int. Conf. Control, Automation and Systems (ICCAS2017), pp.1661-1662, 2017.
- T. Sasaoka, I. Kimoto, Y. Kishimoto, K. Takaba, and H. Nakashima: "Multi-robot SLAM via Information Fusion Extended Kalman Filters," Proc. of 6th IFAC Workshop on Distributed Estimation and Control in Networked Systems, pp.303-308, 2016.
- Y. Zhou, A. Ohashi, and K. Takaba: "3D Model predictive landing control of an unmanned aerial vehicle by using partial feedback linearization," SICE Annual Conference 2021, on-line, Sept 8-10, 2021.
-
Y. Zhou, A. Ohashi, and K. Takaba: "Model predictive landing control of an unmanned aerial vehicle by using partial feedback linearization,"
Proc. of the 2020 IEEE Region 10 Conference (TENCON2020) , pp. 1159-1164, 2020. - Y. Zhou and K. Takaba: "Optimal landing control of an unmanned aerial vehicle via partial feedback linearization," Proc. of 2019 Int. Conf. on Advanced Mechatronic Systems, pp.218-223, 2019.
- T. Yamaguchi and K. Takaba: "Remote tracking control of a quadrotor-type drone subject to uncerrtain time delays," Proc. of SICE Annual Conference 2018, pp. 1137-1143, 2018.
- J. Shirai, T. Yamaguchi and K. Takaba: "Remote visual servo control of drone taking account of time delays," Proc. of SICE Annual Conference 2017, pp. 1589-1594, 2017.
- K. Takubo, S. Miyagawa, and K. Takaba: "Formation control of wheeled vehicles on a slope," Proc. of 18th Int. Conf. Control, Automation and Systems (ICCAS2018), pp. 114-119, 2018.
- D.Tsuzuki and K.Takaba: "Vehicle following and formation control of nonholonomic vehicles using time-state control form," Proc. of SICE Annual Conference 2016, pp.1666-1672, 2016.
- T. Miyazaki, K. Takaba: "Formation control of mobile robots with obstacle avoidance," Proc. of 14th Int. Conf. Control, Automation and Systems (ICCAS2014), pp. 121-126, 2014.
- T. Miyazaki and K. Takaba: "Formation Control of Mobile Robots with Obstacle Avoidance," Trans. of the Institute of Systems, Control and Information Engineers, vol.28, no.2, pp.50-57, 2015 (in Japanese).
Safe and Efficient Battery Management via Control Techniques
- BMS Group -
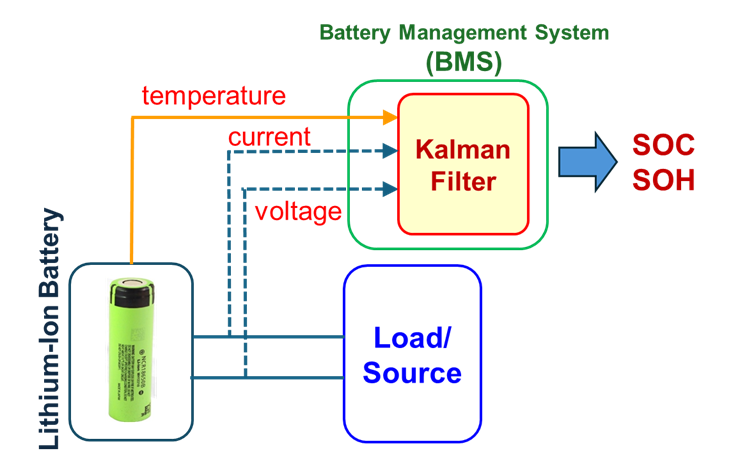
Due to their high energy density and large capacity, lithium-ion batteries have been widely used in many electric devices (especially in electric vehicles).
A battery management system (BMS) is essential for the safe and efficient operation of lithium-ion batteries, and the important functions of BMSs should include the estimation of the state of charge (SOC) and state of health (SOH) and the aging diagnosis.n particular, SOC should be estimated online with high accuracy in order to prevent firing due to over-charge and to detect anomalies.
Therefore, we are working to improve the accuracy of SOC and SOH estimations based on mathematical models of batteries, using techniques from the control theory such as Kalman filter and system identification.
- 溝口,鷹羽:ニューラルネットワークとEKFによるリチウムイオン蓄電池のエネルギー状態推定,2023年度SICE関西支部-ISCIEシンポジウム,大阪,1月12日, 2024.
- T. Kikuchi and K. Takaba: "Multirate SOC estimation of lithium-ion batteries using constant phase element model," 53rd ISCIE Int. Symposium on Stochastic Systems Theory and Its Applications (SSS2021), 2021.
- 菊地,鷹羽:"定位相要素を用いたリチウムイオン蓄電池のマルチレートSOC推定," 第65回システム制御情報学会研究発表講演会(SCI21), online, 5月26-28日, 2021.
- 林,福井,有馬,鷹羽: "電流観測ノイズを考慮した高精度蓄電池残量推定システム," 電子情報通信学会和文論文誌B, vol. J104-B, no.1, pp. 1-9, 2021.
- 小森,鷹羽:"リチウムイオン蓄電池の単粒子モデルの内部パラメータ同定," 令和2年電気関係学会関西連合大会, 滋賀県草津市, 11月14,15日, 2020.
- 林,井本,鷹羽,福井:"リチウムイオン蓄電池の制約条件付き逐次パラメータ推定," 令和元年電気関係学会関西連合大会,大阪市,11月30日-12月1日,2019.
- Y. Imoto, K. Takaba, L. Lin, and M. Fukui: "SOC estimation of lithium-ion batteries by extended Kalman fixed lag smoother," Proc. of 50th ISCIE Int. Symposium on Stochastic Systems Theory and Its Applications (SSS2018), pp. 83-87, 2018.
- M. Oya, W. Sueki, Y. Hayakawa, K. Takaba, and M. Fukui: "Combined RLS-EKF method for simultaneous SOC and parameter estimations for lithium-ion batteries," ECS Transactions, vol. 80. no. 10, pp. 207-217, 2017.
- L. Lin, H. Ono, M. Fukui, and K. Takaba: "An in situ full charge capacity estimation algorithm for li-ion batteries using recursitve least-squares identification with adaptive forgetting factor tuning," ECS Transactions, vol. 75, no. 20, pp. 111-119, 2017.
- 大矢,末岐,鷹羽,福井: “拡張カルマンフィルタによるリチウムイオン電池のSOC推定法の比較検討,” 電池討論会,幕張,11月30日〜12月2日, 2016.
- 大矢,鷹羽,林,石崎,河原林,福井: "パラメータ依存状態空間モデルに基づく蓄電池のSOC推定," システム制御情報学会論文誌, vol.29, no.10, pp.433-440, 2016.
- 林,石崎,鷹羽,福井: "適応的忘却係数調整によるリチウムイオン蓄電池の逐次最小2乗同定," 電子情報通信学会論文誌B, vol.J99-B, no.7, pp. 481-489, 2016.
- L.Lin, K.Takaba and M.Fukui: "An accurate SOC estimation system for lithium-ion batteries by EKF with dynamic noise adjustment," Proc. 15th Int. Symp. on Communications and Information Technologies (ISCIT2015), pp.33-36, 2015.
Mathematical Theory and Control of Multi-Agent Systems A system in which multiple agents are dispersed across a network and autonomously and distributively control themselves through local interactions and information exchange with neighboring agents to perform cooperative tasks such as synchronization, consensus formation, and formation flight is called a multi-agent system.
Multi-agent systems have applications in various fields, including smart grids, sensor networks, vehicle control, distributed computing, physics, and systems biology. Consequently, the development of control theories for these systems is highly anticipated.
- Data-driven distribted cooperative control
- Distributed multi-agent optimization
- Robust synchronization of uncertain agents
- Distributed cooperative control via advanced information technologies such as cloud repositories, block chains, etc.
- Distributed Kalman filters
Synchronization of metronomes
The initially separate metronomes synchronize by interacting through the mobile stand which transmits the oscillations of the metronomes.
Notice that the stand is also slightly oscillating.
Simulation: Synchronization of nonlinear agents over a stochastically switching network
The four colored dots are the states of each nonlinear agent. When they overlap it means that synchronization has been achieved. We conducted a MATLAB simulation to observe how these agents synchronize under the condition that the communication links between agents (black lines) switch stochastically.
When some communication links are connected, each agent controls itself based on local information from its neighboring agents.
K. Takaba: "Synchronization of passive agents over stochastically switching networks with imperfect prior information," 45th ISCIE Symposium on Stochastic Systems, Okinawa, November 1,2, 2013.
- K. Takaba and T. Namba: "Data-driven synchronization of linear multi-agent systems," accepted for presentation, 2025.
- T. Namba and S. Ahmed: "Dynamics-aware distributed optimization over a network of input-saturated linear agents," under review, 2025.
- Y. Sakamoto, T. Namba, and K. Takaba: "Workplace Energy Management with EVs by Distributed Mixed-Integer Linear Programming," under review, 2025.
- T. Namba and K. Takaba:"Cloud-mediated self-triggered synchronization of physically coupled linear agents," IEEE Control Systems Letters, vol. 7, pp. 3836-3841, 2023.
- T. Namba and K. Takaba: "Self-triggered output synchronization of heterogeneous linear agents through a cloud repository," SICE Journal on Control, Measurement, and System Integration, vol. 16, no. 1, pp. 215-226, 2023.
- T. Namba and K. Takaba:"Cloud-mediated self-triggered synchronization of a general linear multi-agent system over a directed graph," IET Cyber-Physical Systems: Theory & Applications, 2024.
- T. Namba, S. Ahmed, K. Takaba: "Robust synchronization of uncertain physically coupled heterogeneous linear agents," 63rd IEEE Conf. on Decision and Control (CDC2024), pp. 4424-4430, 2024.
- K. Takaba: "Robust synchronization of linear multi-agent system with input/output constraints," Artificial Life and Robotics, vol. 23, no. 4, pp. 577-584, 2018.
- K.Takaba: "Synchronization of linear agents with input/output constraints," IFAC PapersOnline, vol.50, no.1, pp.1817-1821, 2017.
- K. Takaba: "Local synchronization of linear multi-agent systems subject to input saturation," SICE Journal on Control, Measurement, and System Integration, vol.8, no.5, pp.334-340, 2015.
- K. Takaba: "A dynamic protocol for local synchronization of linear multi-agent systems subject to input saturation," Proc. of IEEE 54th Conf. on Decision and Control, pp. 4923-4928, 2015.
- K. Takaba: "Synchronization of linear agents with sector-bounded input nonlinearities," Proc. of 15th Int. Conf. Control, Automation and Systems, pp. 1-6, 2015.
- K. Takaba: "Synchronization of linear multi-agent systems with input nonlinearities via dynamic protocols," Mathematical Control Theory II: Behavioral Systems and Robust Control (M.N.Belur, M.K.Camlibel, P.Rapisarda, J.M.A.Scherpen (eds.)), Springer-Verlag, pp.169-181, 2015.
- H.L. Trentelman, K. Takaba and N. Monshizadeh: "Robust synchronization of uncertain linear multi-agent systems," IEEE Transactions on Automatic Control, vol. 58, no. 6, pp. 1511-1523, 2013.
- K. Takaba: "Robust synchronization of nonlinar agents over directed communication graph," Proc. of 7th IFAC Symposium on Robust Control Design, pp. 33-38, 2012.
- A. Ohashi, K. Takaba: "A modified GMRES method for a symmetric solution to Lyapunov equation for multi-agent systems, SICE Journal on Control, Measurement, and System Integration, vol. 12, no. 6, pp. 223-227, 2019.
- A. Ohashi and K. Takaba: "A modified GMRES method for solving large-scale Lyapunov equations for multi-agent systems," Proc. of SICE Annual Conference 2017, pp. 1583-1588, 2017.